
从2024北京车展,看奇瑞的爆发
从2024北京车展,看奇瑞的爆发 导语 Introduction 18.2 万辆、同比劲增 43.7%,奇瑞控股集团 4 月喜人成绩的背后,爆发的深层因素,已经从北京车展的氛围和细节里折射出来。 作者丨石 劼...
2024-05-06 17:08:02


我们花6200块钱,给19年的卡罗拉装了个高阶智驾。。。
前几天马斯克闪现国内的事,大家应该都知道吧。
从落地到离开不到 24 个小时,期间马不停蹄地见了各种各样的大佬。不仅帮特斯拉的数据安全正名,解除了政府大院对特斯拉车辆的禁行限制之外,还顺道给 FSD ,也就是他们的自动驾驶系统的国内落地加了个速。

至于现在的 FSD 好不好用,我们会在这个月肉身去北美测试一波,大伙可以期待一下我们的视频。
但一个蛮有意思的点是,就算是几年前买的老款 Model Y ,只要升级了软件,就能无损用上最新的 FSD 。搞得国外很多特斯拉的老车主们,心里都暖暖的。
也搞的很多开旧能源汽车的同事们心里痒痒的。
啥时候老款油车才能像老款特斯拉一样,用上高阶智驾啊!
但你别说,你还真别说,现在市面上还真有那么一个神奇的产品,它不仅声称能够让传统燃油车用上高阶智驾,而且它和 FSD 一样,都是原车无损升级,随买随用。
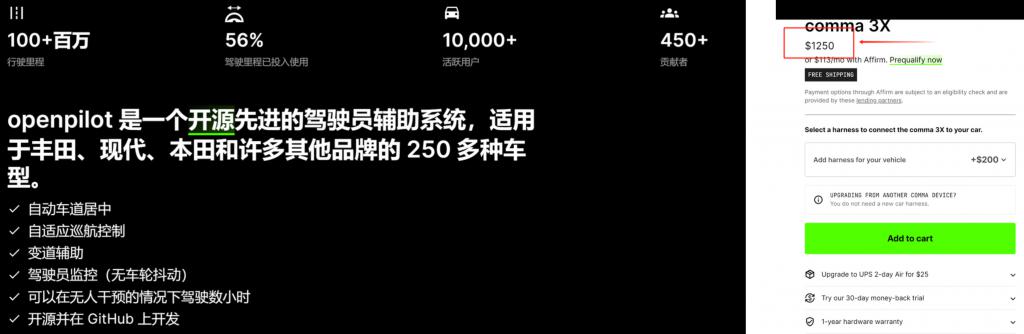
最最重要的是,这玩意只有 FSD 价格( 国内售价 6.4 万人民币 )的 N 分之一。
听起来多少有点过于科幻,毕竟它的意思不就是,那些个花了大价钱搞激光雷达的车企,都是大冤种嘛!
试试,必须试试。
就是下面这个看着不是很起眼的玩意,它的名字叫 Openpilot 。

它的原理就跟打游戏的时候插个 U 盘就能开外挂一样,只要把它装在绝大多数的油车,比如满大街跑的卡罗拉上头,理论上,就能让实现 NOA 这种高阶的智能驾驶。


而它的作者乔治 · 霍兹之所以会整出这么个玩意,其实还是跟他之前的经历有关。
2007 年 18 岁的他仅一把螺丝刀就破解了 iphone ,直接将局限于 AT&T 网络的 iphone 改成了全网通,两年后又首发 iPhone 3GS 越狱软件,给 iphone 3GS 也破解了。

这还没完,刚搞完 iphone ,他转头又花了五个星期,破解了号称 " 坚不可摧 " 的索尼 ps3 。
所以这人是啥呀,黑客呗!
彼时的他,大厂百万年薪的工作可谓点击即送,但游历完谷歌、 Facebook 各种大厂后,他觉得上班还是太无趣了,转头就成立 comma 公司,搞出了这个 openpilot ,一个即插即用的辅助驾驶系统。
而在刚发布的时候,这个 Openpilot 不论从价格还是性能上都狠狠压了特斯拉一头,甚至被人们称作特斯拉在自动驾驶上最大的竞争对手。

结果好景不长,没过多久他们就被美国国家公路交通安全管理局 NHTSA 通知,说他们在未经审批和管理的情况下售卖自动驾驶技术,不合规,必须 ban 掉!
结果乔治 · 霍兹表示,那我和同行交流总行了吧!大手一挥,就把 Openpilot 的代码开源了。。。
主打一个叛逆。。。
我们拿到的这套设备就是国内玩家根据开源代码开发的魔改复刻版本,和卖家激烈砍价后的价格是 6200 软妹币,几乎只有原版价格的一半。
从结构上看,它有着一个 3D 打印的外壳、前后共计 3 个的摄像头、一块清晰度还不错的显示屏以及一个能把它粘在前挡玻璃上的支架。

设备里头,内置了最新版本的 Comma 3X 智能驾驶软件,它的原理其实和目前大部分的纯视觉自动驾驶一样,这俩摄像头,一个长焦一个广角,负责看前面的路。屏幕下面摄像头则是用来看你开车的时候,有没有走神。
它们能靠神经网络识别前方的道路信息,然后控制车辆实现车道居中、跟车、打灯变道甚至是按导航行驶的功能。
最吊的是,它支持的车型有 250 多款,几乎都是传统车企的油车。而且这玩意还能连 WIFI 自动 OTA ,越 O 支持的车型越多。

要说它的原理是啥, Openpilot 还真就和开个外挂差不太多。
许多老车上,都有着基础的 ACC ,也就是自适应巡航功能。
一般来说,它们只有在速度起来以后才能车道保持或者定速巡航,但只要把 Openpilot 和车上的 ACC 控制系统连起来以后,它就能把车上原本摄像头的画面和车身控制指令黑掉,换成它自己的。
而从实测的视频里看,在城市和山路上全程脱手开的用户一抓一大把,这玩意好像还挺靠谱的。

但在我们肉身体验以后。。。
只能说它离目前主流的高阶智驾,差距还是挺明显的。
事先说明啊,因为这个系统是完全开源的,我们拿到手以后因为还有些适配上的小 bug ,所以自己动手改了一些接口和参数才让它真的能在卡罗拉上跑起来。

而且因为我们比较怕死,所以在测试的时候往车上塞了一堆安全员,也把车速控制在了比较低的水平。
所以奉劝想自己试试兄弟们,还是算了。因为这玩意不仅有挺高的编程门槛,对车技也有不低的要求。
看我们测测就算了,请勿模仿啊,请勿模仿。
说回体验部分,虽然这个 Openpilot 又是纯视觉神经网络,又是端到端感知决策,甚至还支持城市领航,但在实际应用中的表现其实算不上特别稳定。
比如需要在路口左右转弯的时候,因为前视摄像头视角的限制,它很难找到转弯之后的车道线在哪,就只能边开边找。

找到了还好说,要是找不到,就会直接冲着非机动车道去了。
除非是在等灯的时候,前面能有一台别的车,它就能跟着前车的轨迹走走,增加转弯成功的几率。
掉头啥的就更别想了,一次没成功过。

还有就是这个红绿灯识别,虽说确实能在红绿灯前头停下来,但不管是红灯还是绿灯它都会停。
所以需要在绿灯的时候给一脚油门才能通过。

而且这个打灯变道,虽说很多老车上都有盲区检测的功能,但是因为探测距离有限,不能像真正的高阶智驾那样,用来判断变道安不安全。
所以,还是得自己看看后方有没有车,在打灯以后推一下方向盘确认变道,或者是设置打灯后几秒自动变道,略显麻烦。

当然了,这玩意也并不全是缺点,在需要一条道走到黑的情况下,比如单车道的乡间小路或者高架快速路上, OpenPilot 还真就是挺稳定的。
高架啥的就不说了,除了需要自己控制变道和上下匝道的时机以外,甭管是跟车还是车道保持 Openpilot 做的还都挺好的。

之前我们特意把它丢到一条路况复杂的乡村小道试了一下,你别说,大部分障碍物它还都能绕过去。
就算是要拐大弯,因为一直有车道线,所以也不会有往沟里开的情况。

而且实测下来,低光照的环境对摄像头的信息收集其实影响不大,白天能搞定的都没问题,白天不能搞定的也还是险象环生。
所以做个总结啊, Openpilot 确实能很大幅度提升老旧燃油车的智驾能力,要是你的运气好,它还真可能实现城市 NOA 的功能。
但问题呢也很明显,这玩意的传感器确实不多,一是没有针对每个车型做标定,很多狭小的场景不太处理的来。二是只有前方能收集信息确实还不够多,要是侧面和后面又来车或者障碍物,就只能自求多福了。

不管是能力强弱还是实力发挥的稳定性,和目前已经全量推送的量产高阶智驾,差距还是蛮明显的。
我嘛。。。还是劝你别买。
不过,虽说这玩意目前还是不太靠谱,但从它的身上我们还是能看出一些智能驾驶行业的小趋势。
那就是现在做智驾,对硬件的要求其实真就没那么高了。连只有俩前视摄像头的 openpilot 都能做个半成品的城市 NOA ,要是多来几个不同位置的摄像头,后果不堪设想。
比如前一阵我们就去试了试大疆最新的成行智驾平台,只靠 7 个摄像头,他们就能搓出一套能搞定复杂路况的高阶智驾。

要说为啥猛堆硬件和算力算力的思路过时了,一方面是因为之前的车企们对智驾大都有点火力不足恐惧症,一想到智驾这么复杂,硬件肯定是越多越好。
另一方面,是此前各家搞算法的能力其实都一般,工程师能想到的场景越多,硬件之间配合的规则就越复杂。
而就像电路设计一样,为了确保一个规则能跑通,还得设计一大堆保证它能实现的验证功能。
久而久之,就成了代码屎山了,算力不够还真跑不起来。
但在做了这么多年以后,像华为、大疆这种研发能力够强的大厂,慢慢的把算法优化做起来了,屎山变小,算力就能被用在刀刃上,跑更复杂的模型,做更精准的规控。
结果就是硬件少了,功能还变牛逼了。你看问界的智驾版本车型,最多也只会用一个激光雷达了,智界 S7 甚至都已经用上纯视觉了。

所以要我说,现在车企之间的智驾大战,最后大概率会变成硬件没啥差别,靠软件决胜负的状态。
而对于手里没有智驾技术,未来又太想在这方面落后的传统车企来说,这种重软件轻硬件的趋势,对他们来说可能更加重要。
毕竟自研一套成熟的智驾系统成本相当之高,特斯拉早年搞过的训练集群,就需要一万个英伟达的 H100 芯片,单个价格 30 万人民币,加起来就是几亿美元的成本。
前一阵他们就表示,原先的 H100 已经不好使了,会打算再花 10 亿刀自研超算集群 Dojo ,并且两年投入 20 亿刀提升它的能力。

可真费钱呐。
相比于冒着打水漂的风险自己烧钱,现成的、成熟的还很便宜的智驾系统,对于那些在智驾时代遥遥落后的海外车企来说,简直就是后来居上、弯道超车的外挂嘛。
像是大众马上就会用上大疆的这套系统,成本大概只要一套七千,前两天也有消息表示丰田会在全球车型上用上华为的智驾硬件。

自主品牌的智驾技术出海,可能马上就要实现了。
无奖竞猜,是咱们先走出去,还是特斯拉 FSD 先走进来呢?


2024-05-06 17:08:02

2024-05-06 17:05:48
2024-05-06 03:37:31

2024-05-06 03:35:17

2024-05-06 03:33:02

2024-05-06 03:30:48

2024-05-06 03:28:33

2024-05-06 03:26:19

2024-05-06 03:24:04

2024-05-06 03:21:49

2024-05-06 03:19:35

2024-05-06 03:17:21

2024-04-27 14:11:28

2024-04-27 14:09:14

2024-04-27 14:06:59

2024-04-27 14:04:45

2024-04-27 14:02:30

2024-04-27 12:37:28

2024-04-27 12:35:13

2024-04-27 12:32:59